
3D Imaging Technologies Explained: Stereo Vision vs. Laser Triangulation vs. Time-of-Flight
3D imaging has become a key part of modern machine vision systems, enabling machines to understand depth, shape, and spatial relationships rather than just capturing flat images. This capability is increasingly important across industrial automation, robotics, inspection, and autonomous systems. As industries move toward smarter and more data-driven operations, 3D vision is no longer optional but essential.
Among the available approaches, three technologies are widely used in real-world applications: stereo vision, laser triangulation, and time-of-flight. Each operates on a different principle and is suited to different types of tasks. Understanding how they work and where they perform best is critical when selecting the right solution.
What is 3D Imaging in Machine Vision
3D imaging refers to capturing depth information along with visual data so that a system can measure distances and reconstruct surfaces. In addition to X & Y coordinates from area scan cameras, 3D camera offer Z axis information enabling the height / depth information. Instead of relying only on color and intensity, 3D systems generate spatial data that can be used for measurement, inspection, and navigation.
Common outputs include depth maps that show distance at each pixel, point clouds that represent objects in three-dimensional space, and surface profiles that provide detailed shape information. Compared to traditional 2D imaging, 3D vision enables more accurate decision-making in applications where geometry matters.
Stereo Vision
Stereo vision is inspired by human eyesight. It uses two cameras placed at a fixed distance apart, each capturing a slightly different view of the same scene. By comparing these two images, the system calculates the difference in pixel positions and uses that disparity to estimate depth.
This approach is passive, meaning it does not require any additional light source. As a result, it works well in environments with sufficient natural or ambient lighting. However, its performance depends heavily on the presence of texture in the scene. Surfaces that are uniform or reflective can make it difficult for the system to find matching points between images.
Stereo vision is often chosen for applications where cost and scalability are important. It is widely used in robotics, agriculture, and autonomous navigation, especially when covering larger areas. The trade-off is that it requires significant computational processing and may not deliver the same level of precision as active methods.
Laser Triangulation
Laser triangulation is an active 3D imaging method that uses a projected laser line or point to measure surface geometry. A camera observes how the laser deforms when it strikes an object, and the system calculates depth using geometric relationships.
This method is known for its high accuracy and resolution. Because it does not rely on natural texture, it performs well even on smooth or low-contrast surfaces. This makes it particularly suitable for inspection tasks where fine detail is critical.
Laser triangulation is commonly used in industrial environments for applications such as weld inspection, surface defect detection, and dimensional measurement. While it offers excellent precision, it is more sensitive to ambient lighting and typically requires controlled conditions. It can also be slower when scanning large areas, as it often involves line-by-line acquisition.
Time-of-Flight (ToF)
Time-of-Flight technology takes a different approach by directly measuring the time it takes for light to travel from the sensor to the object and back. The camera emits light pulses, usually in the infrared spectrum, and calculates distance based on the time delay of the reflected signal. The 3D ToF cameras use VCSELs of 850nm and 940nm making it suitable for both indoor and outdoor imaging conditions
This allows ToF systems to generate depth information in real time with relatively simple processing. They perform well in low-light or even completely dark environments, making them highly versatile.
However, ToF cameras generally offer lower spatial resolution and accuracy compared to laser triangulation. They can also be affected by noise and interference, especially in complex scenes with reflective surfaces. Despite these limitations, ToF is widely used in applications such as gesture recognition, people tracking, and obstacle detection, where speed is more important than fine detail.
ToF with RGB Kit
A Time-of-Flight (ToF) imaging system with an RGB kit combines high-speed 3D depth sensing with full-color image capture to create detailed, colorized point clouds for machine vision applications. In the Lucid Vision Labs RGB 3D Kit, the Helios2 ToF camera measures object distance by calculating the time taken for emitted light to return to the sensor, while the Triton 3.2MP RGB camera captures corresponding color information. By synchronizing and calibrating the two cameras, the system generates accurate 3D data enriched with real-world color, enabling enhanced object detection, robotic guidance, bin picking, quality inspection, logistics automation, and digital twin creation. The integrated kit simplifies deployment by providing pre-calibrated hardware and software tools, making it easier to implement industrial-grade color 3D imaging in challenging environments.
Comparison of Technologies
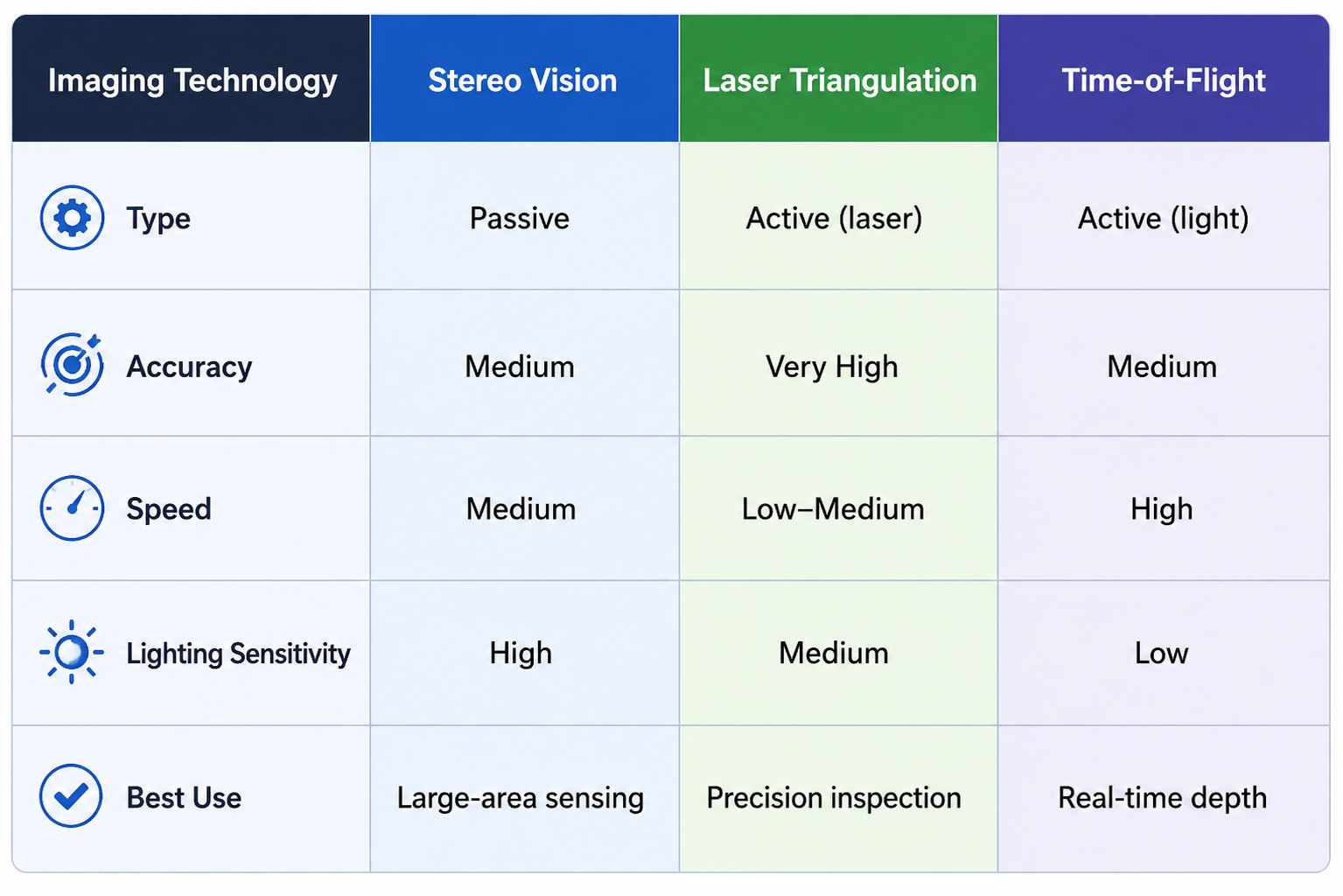
Each of these technologies brings a different balance of accuracy, speed, cost, and environmental sensitivity. Stereo vision is typically more affordable and flexible but depends on lighting and texture. Laser triangulation delivers very high precision but requires more controlled conditions and can be slower for large-scale capture. Time-of-Flight provides fast, real-time depth sensing with simpler integration, though at the cost of lower accuracy.
In practical terms, the choice often comes down to what matters most in the application: precision, speed, or cost.
Choosing the Right Technology
Selecting the right 3D imaging approach requires a clear understanding of the application’s priorities. If the goal is high-precision inspection, especially for small features or defects, laser triangulation is often the best fit. If real-time responsiveness is critical, such as in navigation or tracking, Time-of-Flight is more suitable. For applications that need a cost-effective and scalable solution across larger areas, stereo vision is a strong option.
Other factors also play an important role, including surface characteristics, environmental lighting, and system complexity. No single technology is universally superior, and in some cases, hybrid systems that combine multiple approaches are becoming more common.
Future Trends in 3D Imaging
3D imaging continues to evolve with advances in artificial intelligence and sensor technology. Increasingly, systems are combining multiple sensing methods to overcome individual limitations. AI is also being used to improve depth accuracy and interpret 3D data more effectively.
As Industry 4.0 adoption grows, 3D vision is becoming more integrated into automated workflows, enabling faster and more reliable decision-making on the factory floor and beyond.
Conclusion
Stereo vision, laser triangulation, and Time-of-Flight each play an important role in the 3D imaging landscape. Stereo vision offers flexibility and lower cost, laser triangulation provides high precision for detailed inspection, and Time-of-Flight enables fast and reliable depth sensing in real time.
The best choice depends on the specific requirements of the application, including accuracy, speed, environment, and budget. By understanding the strengths and limitations of each approach, it becomes much easier to select a solution that delivers the desired performance.
{kind=link}